Apie šį buildą
Since last October, I have been working on 2-3" inch frames based on tetrahedral structures and have made several prototypes. Finally, I am able to present to the public the simplest and most appropriate representation of the concept.
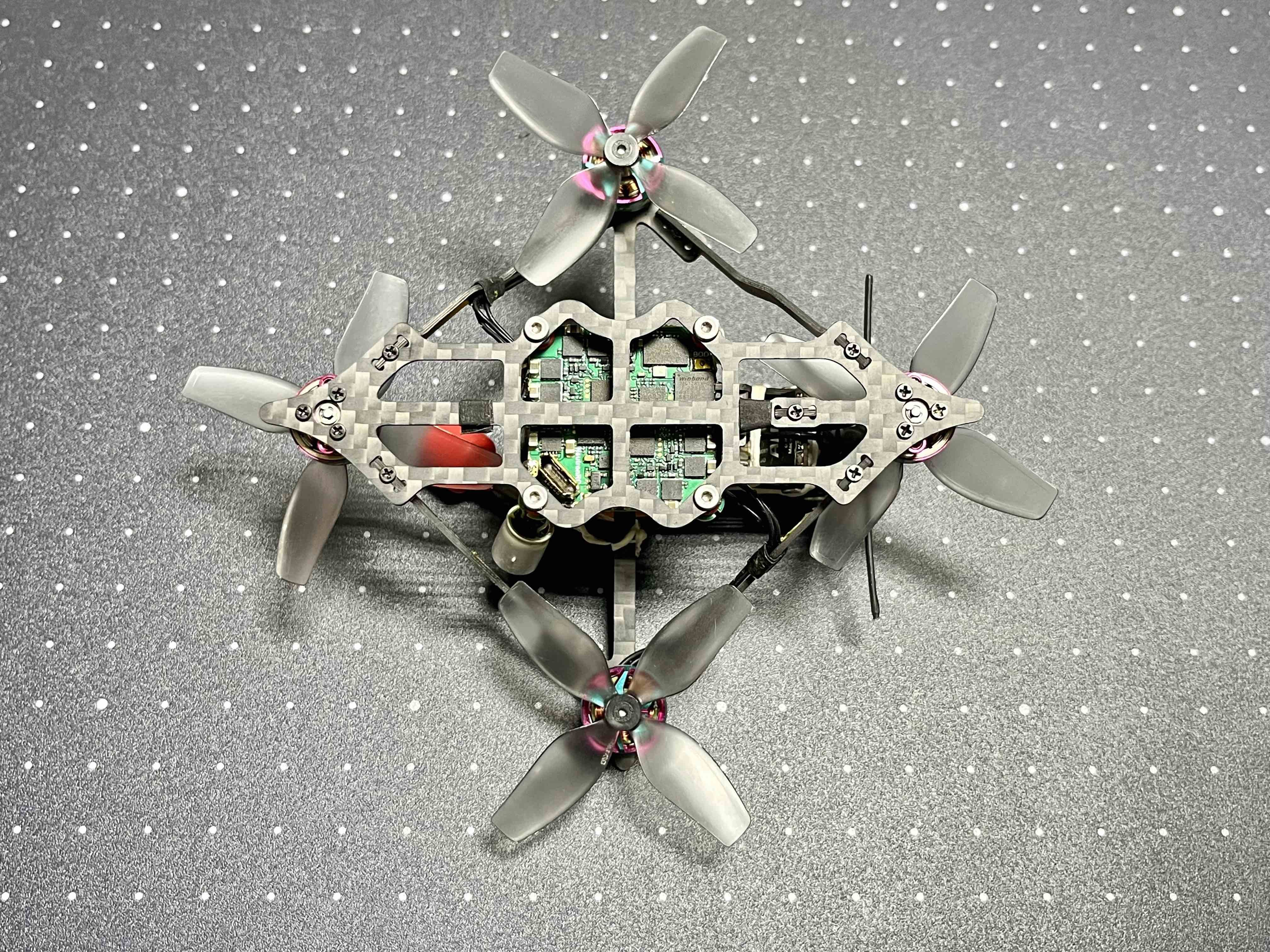
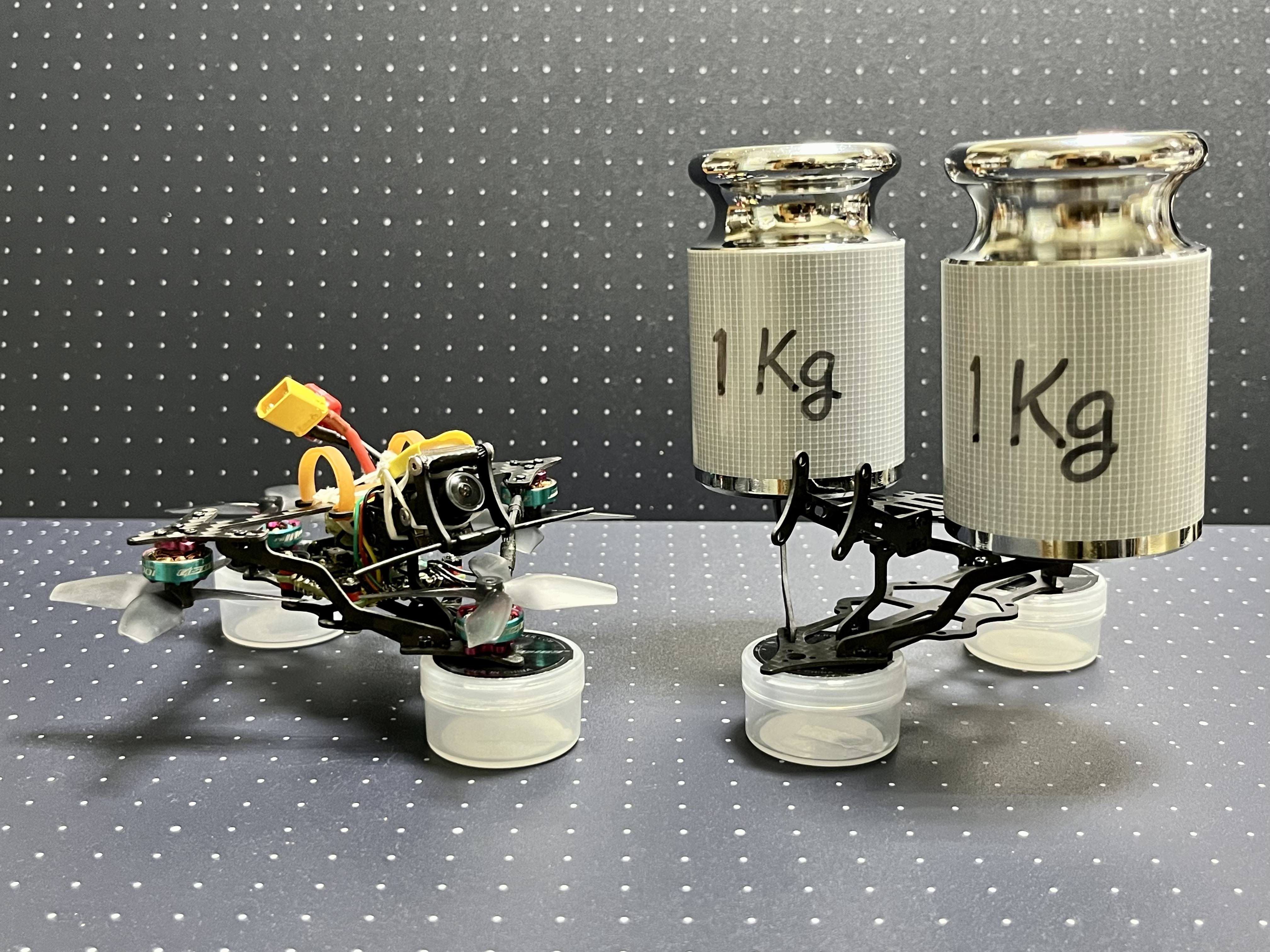
Design ConceptThe tetrahedron is known as the simplest robust structure with four vertices. Each of its six edges has four adjacent edges and one non-intersecting edge. I realized that a pair of non-intersecting edges could be used as arms for a quad-plus drone. So, I attempted to build a quad-plus drone frame using the tetrahedral edges with four motors placed at the vertices, hoping for something lightweight durable, and resonance-free for 2-3" micro drones.
Since a tetrahedron can be placed within a hexahedron (cuboid) with each edge of the former being a diagonal of the latter's rectangle surface, it is not difficult to make each slanted brace (standoff) of this frame out of a carbon fiber plate and connect it perpendicularly to the arms.
For the connection of two orthogonal narrow carbon plates, I tried several methods and arrived at an old and obsolete method. At first I used M2 screws and square nuts, which I found to be suitable for 3" frames but too heavy and over killing for 2" frames. So I decided to use M1.4 screws and regular hex nuts for 2" frames. It seems that M1.4 hex nuts come in two sizes, 2.5mm and 3mm wide. Since the width of a regular M2 square nut is 3mm, I used 2.5mm wide one for M1.4. Although very small, they seem to be strong enough.
First I named this frame "Tetra-he-Drone" just after the word "tetrahedron". But it seems like a dad's joke, I renamed it simply "Tetra" with the number stands for its prop size.
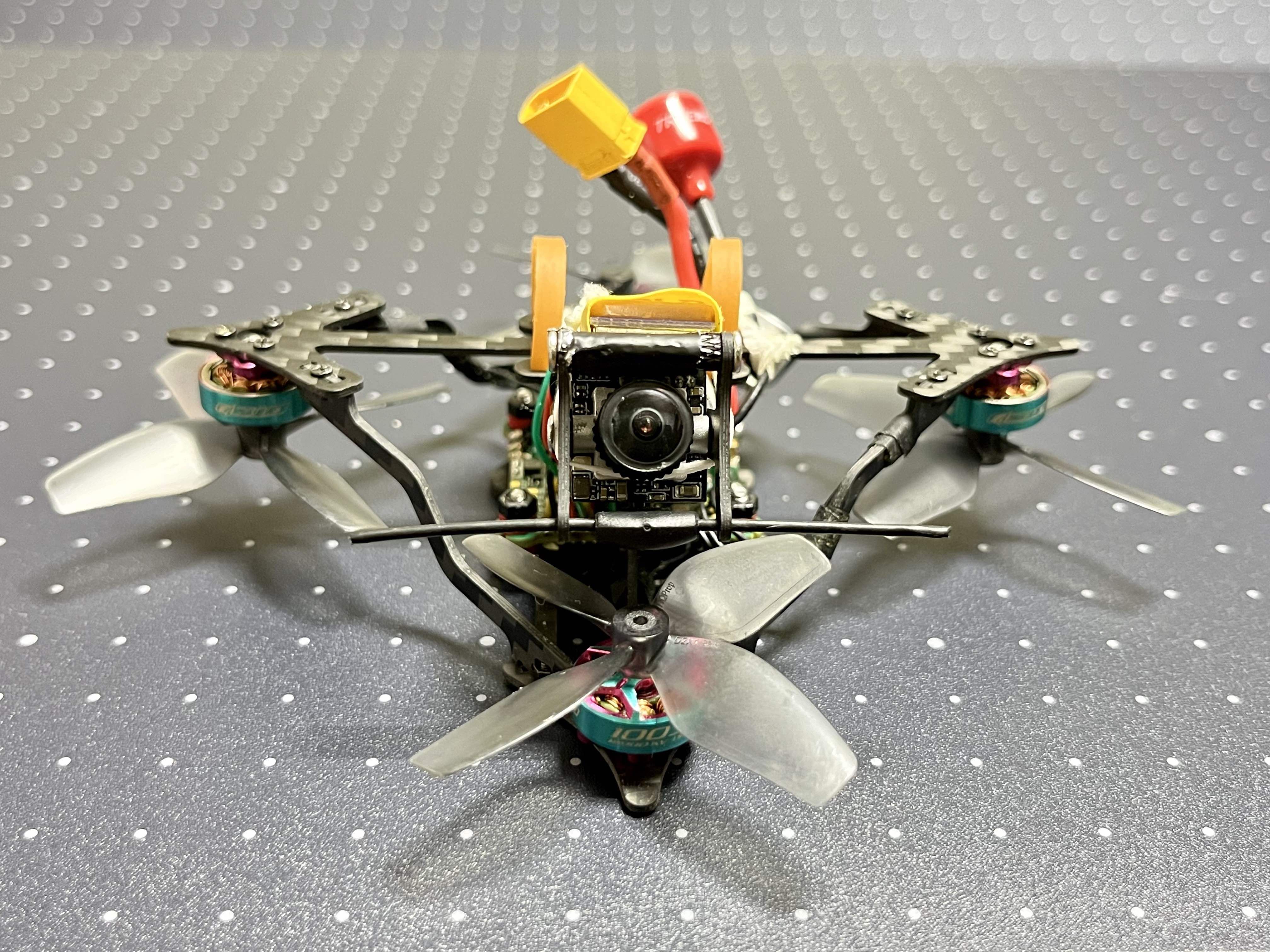
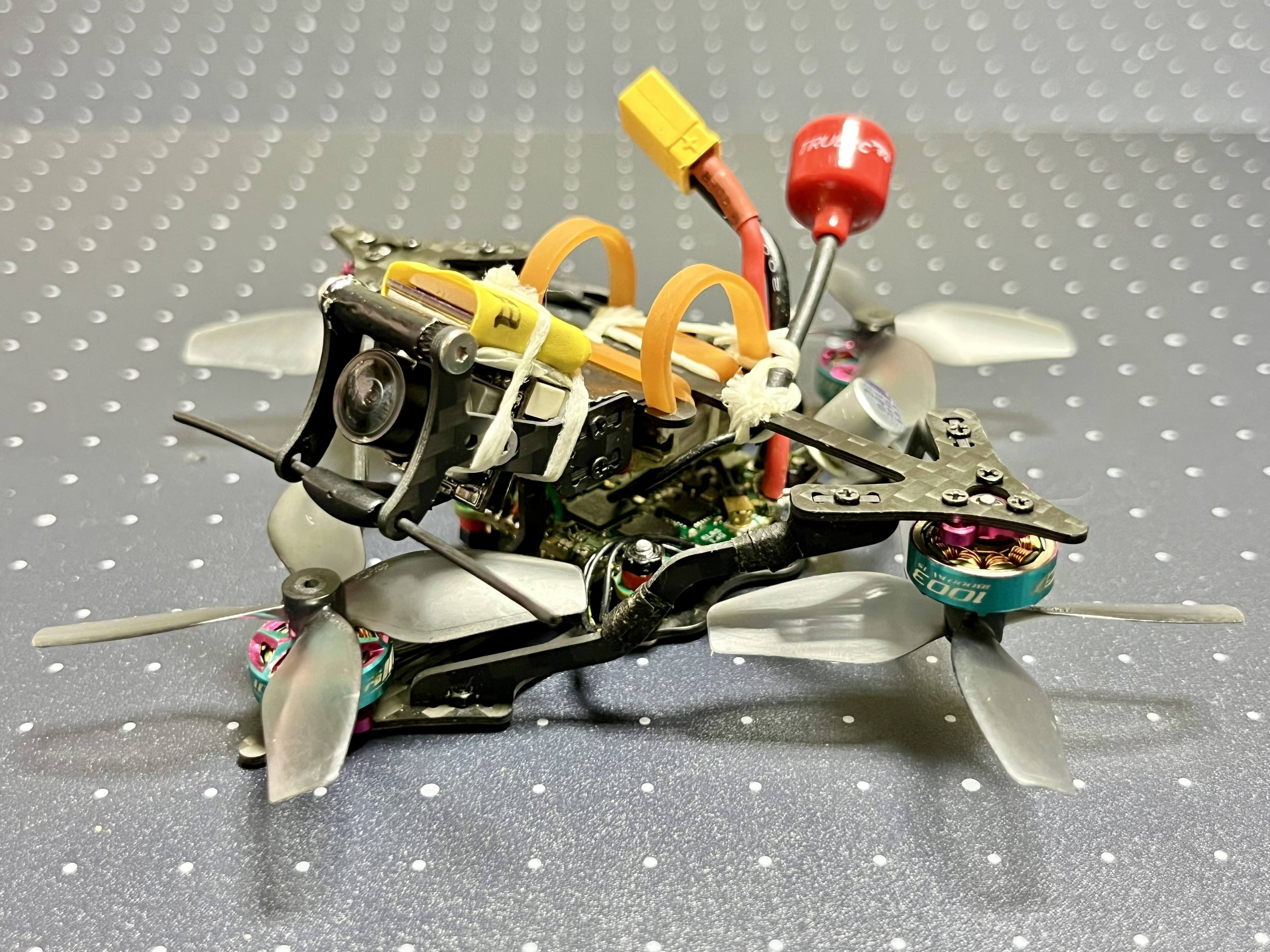
Build- Frame : Tetra 2 Lite (custom frame designed for a 2" analog FPV setup)
- Wheelbase : 87.7mm
- Thickness : 1mm
- Motor mount : φ6.6mm, 3 holes, M1.4
- FC mount : 25.5x25.5mm, M2
- Maximum stack height : 22mm
- Compatible with whoop style USB connector
- Compatible camera width : 14mm
- Built-in battery strap holder (can use up to 10mm width strap)
- Built-in rubber band hook (suitable for 3mm wide rubber band)
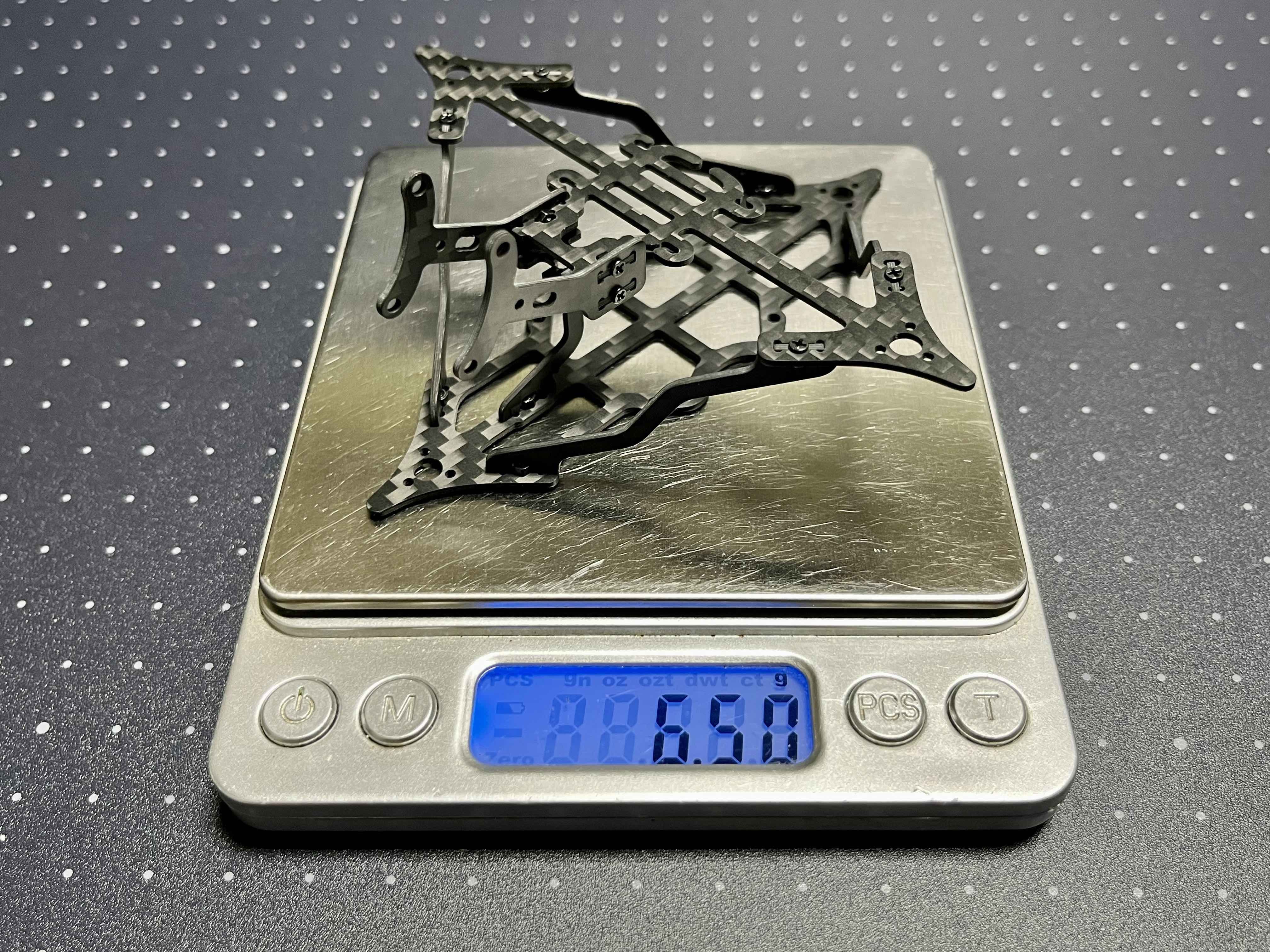
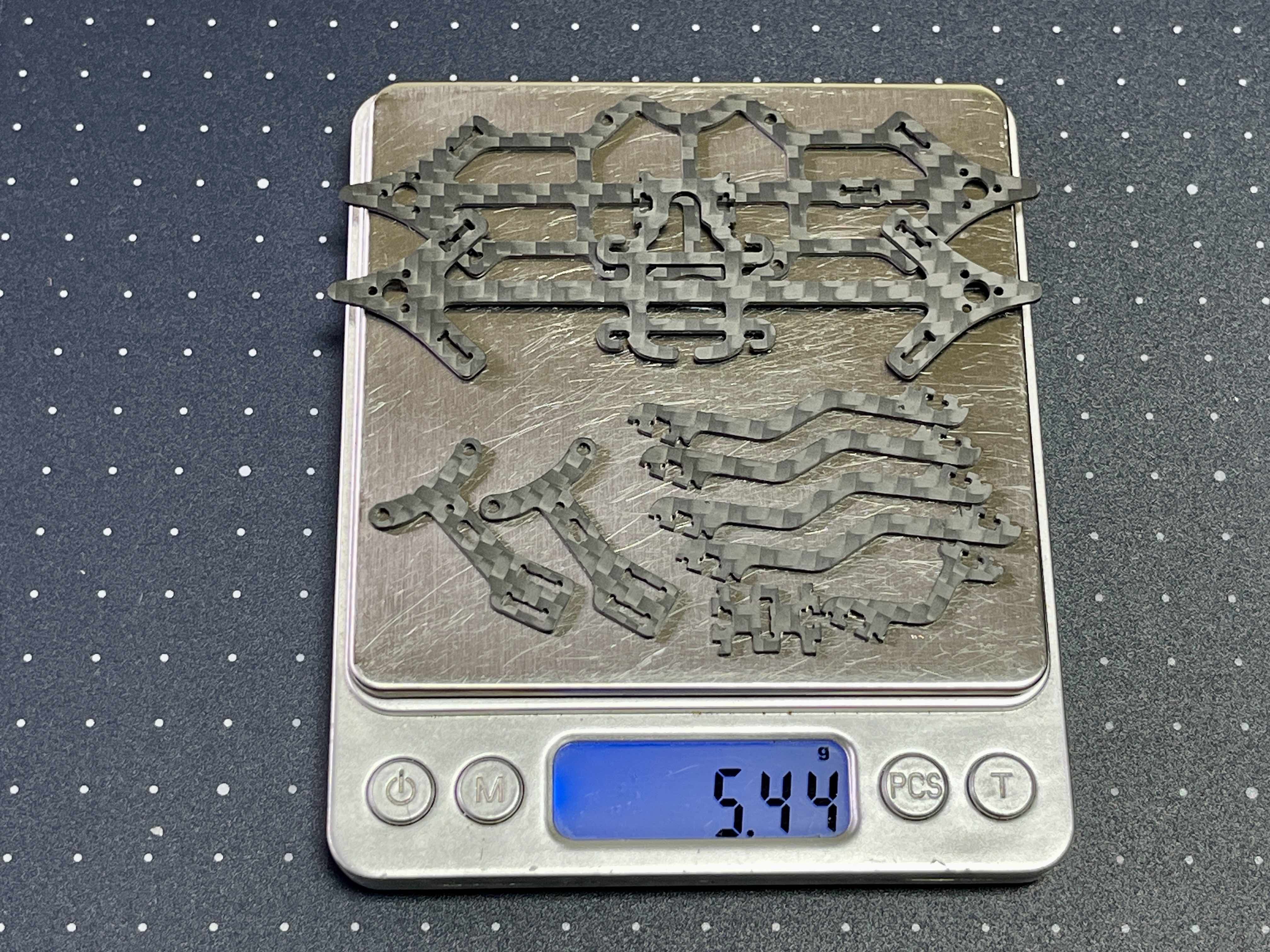
- Weight : Approx. 5.4g (Carbon only), Approx. 6.5g including M1.4 screws and nuts
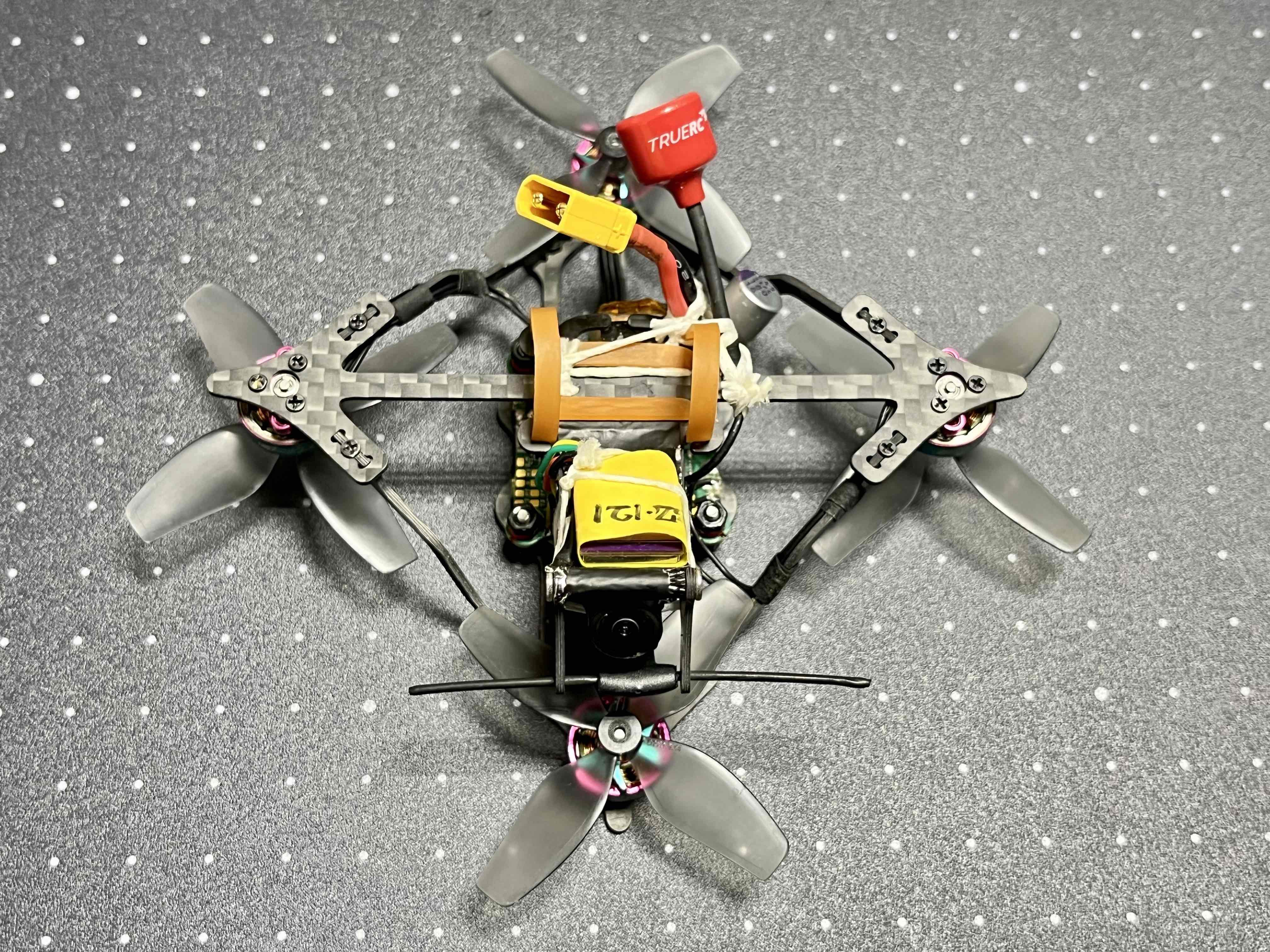
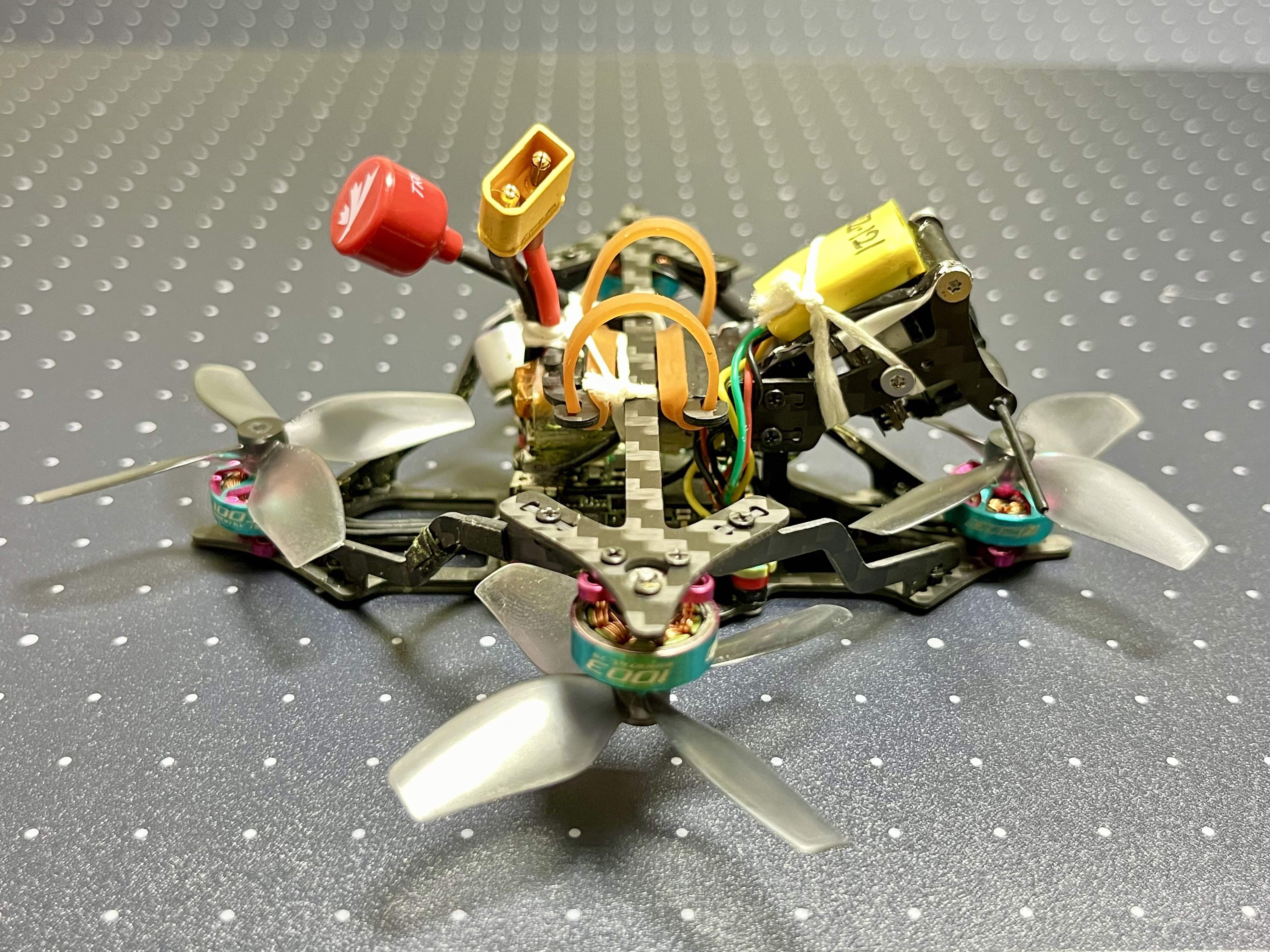
- AIO FC : NeutronRC AT32F435 mini 5in1 AIO, 1-2S 12A AM32 ESC, ELRS 2.4G RX, 400mW 5.8G VTX
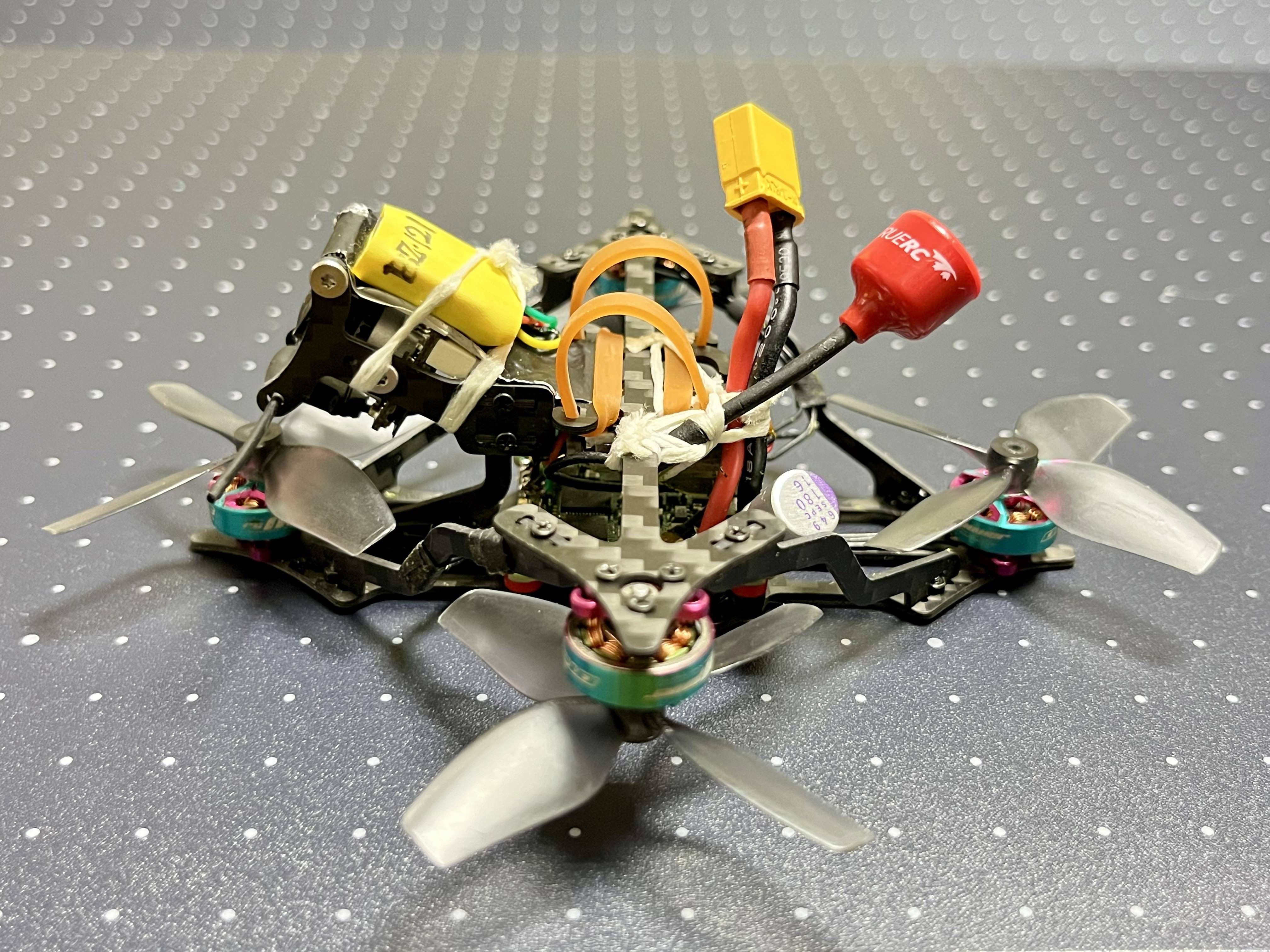
- Motor : RCinPower 1003 18000KV (Motor Output Limit 80% with 2S battery)
- Props : HQProp D2x1.9x4
- Camera : Caddx Ant
- VTX Antenna : TrueRC Singularity 5.8 RHCP UFL Lite 72mm
- Receiver Antenna : TBS Tracer Immortal T 2.4GHz 80mm
- GPS : BZGNSS BZ-121
- Finder : JHEMCU JHE20B
- Weight : 45g (38g without GPS and Finder)
Perhaps the most tedious step in building this frame is securing the carbon plates using M1.4 screw and nuts; compared to M1.4, M2 screws and nuts are much larger and easier to handle. At first, I tried to secure the M1.4 in the same way as the M2, keeping the nut at the slot by hand and inserting the screw. This method is not suitable for the smaller screws and nuts of M1.4. Instead, the method is use tweezers to place the nut at the slot and insert the screw from bellow. The slot is narrow enough to stabilize the nut, so there is no need to hold it in place by hand.
Tuning and Blackbox LogAs usual, I ran the PIDtoolbox Basement tuning in angle mode before flying it outdoors. However, it seems there is no problem for using the default PID of the Betaflight.
As expected, the results of the Blackbox logs were very satisfactory to me. It does not seem necessary to further improve the design of the frame for an analog FPV setup.
After several test of setting of Motor Output Limit value for RCinPower 1003 18000KV motors with NeutronRC 1-2S 12A 5in1 AIO FC and 2S batteries, I found a value of 80% seems very good for the Dogcom 2S 560mAh 150C battery, and also seems not to kill the BetaFPV Lave 2S 450mAh 75C battery even at full throttle.
Flight PerformanceI like to fly very fast and low. However, to avoid unexpected accidents, I limit my maximum speed to 100 km/h when flying low. Finally, even my 2" quads have reached this limit. Furthermore, because of easy control, it becomes much fun to fly also in LOS.
The batteries used in the test flights were Dogcom 2S 560mAh 150C and BetaFPV Lava 2S 450mah 75C.
- Hover Throttle: 20% with Dogcom 560mAh (31.0g), 18% with BetaFPV Lava 450mAh (25.7g)
- Maximum Speed (calm wind): 110.7km/h (30.75m/s) with Dogcom 560mAh, 100.7-102.6km/h (27.98-28.50m/s) with BetaFPV Lava 450mAh
Galerija